Researchers have developed a new method to fabricate soft millimeter-scale materials, paving the way for flexible microrobots to be used in medical procedures and other hard-to-access environments.
The research team, consisting of members from Harvard’s Wyss Institute for Biologically Inspired Engineering, Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS), and Boston University, created a robotic soft spider to demonstrate their technology.
Their paper is published in the journal Advanced Materials.
The new kid on the block
Hollywood’s sci-fi movies may have successfully persuaded us to believe that robots will someday lord over us. However, at least for now, robots are helping humans in classrooms, factories and even operating rooms.
Most recently, soft robotics, whose inside and outside are both made of soft materials, promises more flexibility working around changing or unstructured environments, in a manner that could not be achieved by the traditional, rigid robots.
Because of its inherent compliance, soft robots can be of great use for surgeons. While centimeter-sized soft robots have been created, in order to safely navigate through delicate tissues in human bodies, they not only have to get smaller, but also perform multiple functions.
“The smallest soft robotic systems still tend to be very simple, with usually only one degree of freedom, which means that they can only actuate one particular change in shape or type of movement,” co-author Sheila Russo, who helped start the project as a postdoctoral fellow in Robert Wood’s group at the Wyss Institute and SEAS, and is now an assistant professor at Boston University, said in a statement.
Wood is the Charles River Professor of Engineering and Applied Sciences in the Harvard John A. Paulson School of Engineering and Applied Sciences at SEAS, a founding core faculty member of the Wyss Institute, and the founder of the Harvard Microbiotics Lab.
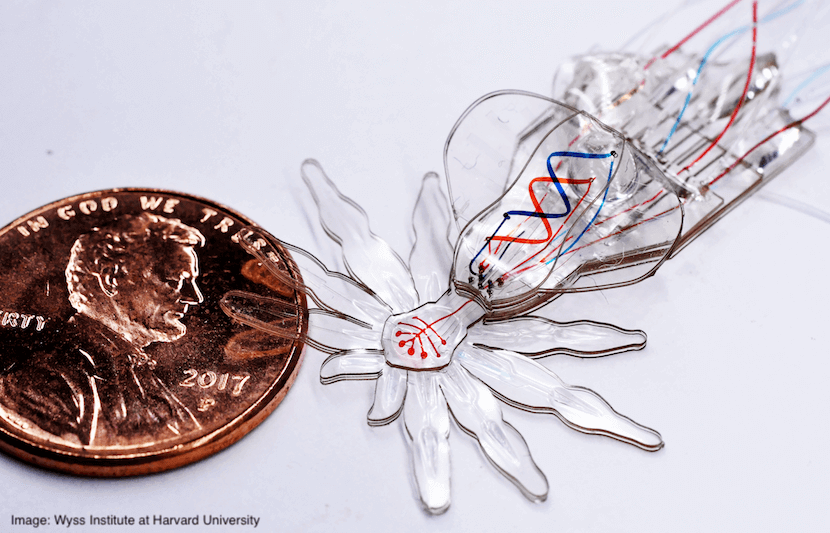
Inspired by a millimeter-sized Australian peacock spider, the researchers developed a new fabrication process to design millimeter-scale robots with multiple functions.
“The idea of designing and fabricating a soft robot inspired by tiny arachnid comes from the fact that it embodies a large number of unsolved challenges in soft robotics,” said Tommaso Ranzani, the first author and corresponding author, who started the study as a postdoctoral fellow in Wood’s group and now also is an assistant professor at Boston University.
“Indeed, it is less than a centimeter wide, has features down to the micrometer-scale, a well-defined three-dimensional structure, and a large number of independently controllable degrees of freedom. In addition, it is characterized by beautiful color patterns.”
Combining three into one
The new fabrication process, called the MORPH (Microfluidic Origami for Reconfigurable Pneumatic/Hydraulic), combines three existing fabrication techniques: soft lithography, laser- micromachining, and injection-induced self-folding.
First, to create the robot’s outside material, the researchers used a soft lithography technique to create 12 layers of silicon.
“This first MORPH system was fabricated in a single, monolithic process that can be performed in [a] few days and easily iterated in design optimization efforts,” Ranzani said in a statement.
Then, they used laser micromachining to precisely cut each silicon layer and bond each one to the one below to create the rough 3D structure of the spider.
And the researchers used an injection-induced self-folding method to integrate hollow microfluidic channels with actuators into each layer and inject these channels with a UV-curable resin, which is injected as liquids and solidified when exposed to UV light.
As the resin solidifies and then becomes liquid again inside the channels, the robot can fold and unfold itself, going from 2D to 3D and vice versa.
“This technique is called injected-induced self-folding,” Russo said in a statement.
“It takes inspiration from kirigami and origami art because we are cutting and then folding the structure in the shape that we want it and it can be reconfigured. If you think about origami artists, they can make a swan out of paper, but then you could take that swan and re-unfold it or fold it in a different way and have another animal.”
Actuators in the abdomen, head, jaws and legs make this a multi-functioning robot, with nine independently controllable degrees of freedom and five structural degrees of freedom.
“By developing a new hybrid technology that merges three different fabrication techniques, we created a soft robotic spider made only of silicone rubber with 18 degrees of freedom, encompassing changes in structure, motion, and color, and with tiny features in the micrometer range,” Russo said in a statement.
Finally, to top it all, the researchers filled the channels with dyed water to mimic the extravagant color patterns of a peacock spider.
Credit: Wyss Institute at Harvard University
Opening doors
Ranzani believes this new fabrication process will allow soft robots to explore highly unstructured and complex environments for multiple applications, ranging from safe and delicate manipulation of tissues inside the human body to searching and rescuing in dangerous areas.
“We hope that this technique will be instrumental to the development of a new class of soft surgical devices able to perform advanced surgical tasks,” he said in a statement.

