
While robots are used in manufacturing industries, the military, space exploration, transportation, and medical applications, there hasn’t been one that could extend its reach until now. Researchers at the University of California, Santa Barbara (UCSB) and Stanford University have created a “soft” robot that could extend its tip and change its direction without moving its body.
Such a robot would be able to maneuver well in tight or constrained spaces, so it could be used effectively in clearing blockages in arteries or tunneling through debris in search and rescue operations.
The research is published in Science Robotics.
The inspiration for this soft robot comes from certain forms of nature that grow from their tips, such as climbing vines, fungi, and nerve cells.
“In the cases where nature uses this type of movement to go somewhere, it’s often trying to create a structure which it can then use,” Elliot W. Hawkes, an assistant professor of mechanical engineering at UCSB, said in a statement.
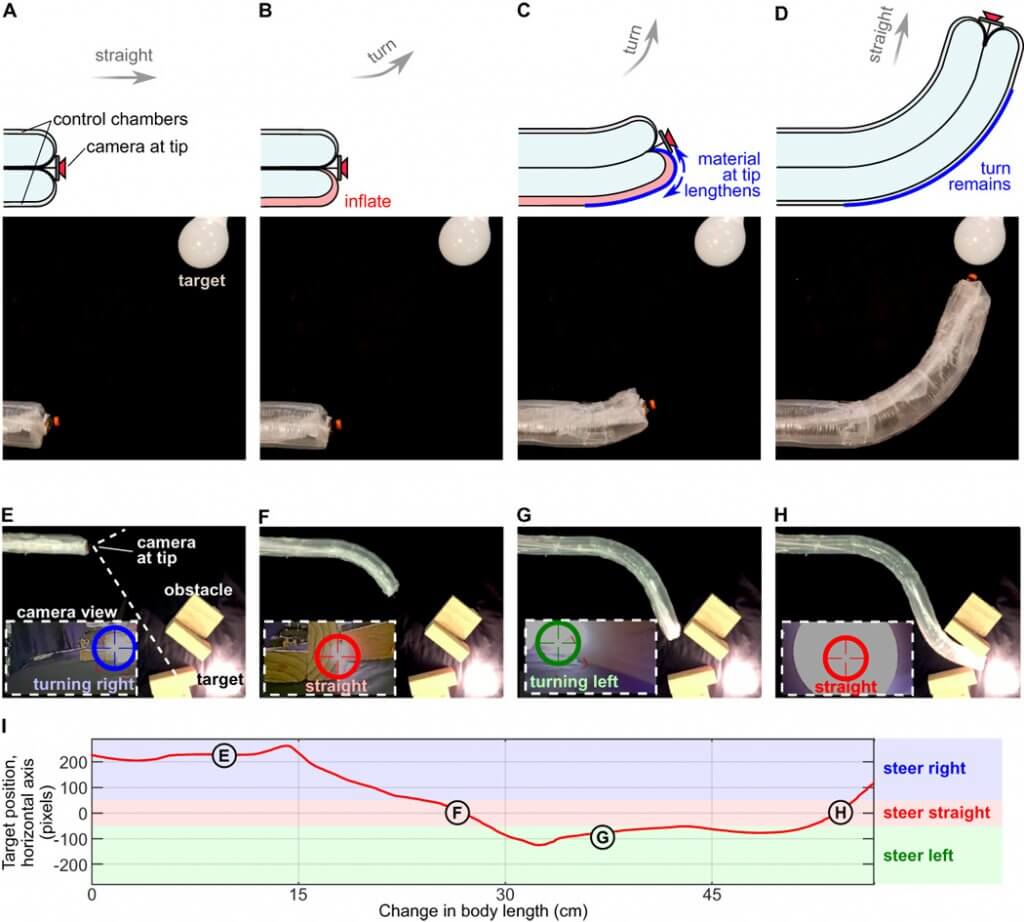
The soft robot is equipped with small pneumatic control chambers and a camera on the tip, which is held in place by a cable that runs through its body and gives visual feedback of the environment. The soft robot grows due to pneumatic pressure from within it, like an inflating balloon, which allows it to transport the things inside it
“Pressure is the driving force,” Hawkes said in a statement.
What’s different in the case of the soft robot, in contrast to a balloon, is that the pressure leads only to the tip unfurling. Because the body of the robot itself does not expand, but takes the shape of the tip’s path, it doesn’t lead to a sliding friction between the body and the walls of the environment. This characteristic is key to the robot’s ability to maneuver tight spaces.
“It helps these robots get through really constrained environments because there isn’t any sliding,” Hawkes said in a statement.
The research team is evaluating the potential application of the soft robot in endovascular surgeries. Unlike conventional techniques, which could pose a problem when a catheter inserted into an arterial system has to navigate narrower blood vessels, the soft robot doesn’t face the same limitation. The robot’s tip would be able to navigate the intricate pathways of the vascular system and bring the catheter along even through narrow blood vessels without rupturing the blood vessel walls.
The soft robot would be useful in search-and-rescue operations, where it could be used to weave its way through debris, without destabilizing it, and deliver water to people who are trapped underneath.
“A robot that uses growth to navigate its environment has a couple of advantages (along with limitations, of course) when compared to a small search and rescue robot that uses locomotion,” Hawkes told The University Network (TUN).
First, our robot can create a structure as it grows through the environment, potentially transferring water or oxygen to a trapped survivor. Second, we’ve shown we can apply large forces to the environment, meaning we could possibly move rubble to free a trapped survivor.
The soft robot would also come in handy in construction, where it could be used to guide cables, wires, and hoses through narrow or hard-to-reach spaces.
The researchers have spent about 18 months on the project.
“While extending through cluttered environments is relatively easy when using the basic concept of an everting pressurized tube, it took a lot more time to figure out how to actively control direction,” Hawkes told TUN.
While the technology is still at the proof-of-concepts stage, the researchers are exploring licensing avenues.
“Research in engineering labs is often more about proof-of-concepts than products that can go on the shelf,” Hawkes told TUN.
“That said, we’re already talking to some companies about possibly licensing the technology, which could lead to development for a viable product (maybe a couple years out if a company decides to pursue it).”
The research team included Laura H. Blumenschein, Joey D. Greer, and Allison M. Okamura from Stanford University.

